ROS Topic Publisher
따라하기 : ROS Topic Publisher 예제
매개변수 설정과 함께 프로그램 시작 프로세스가 모두 단순화되었으며 Jupyter Notebook 환경에서 설정됩니다.
- 01_01_ros_topic_publisher.ipynb Jupyter Notebook을 엽니다.
- 필요한 Python 라이브러리 및 모듈을 가져옵니다.
- 예제 코드를 따라 실행해보세요.
(이 예시에 사용된 Jetson 보드는 'Jetson Nano' 입니다.)
Jupyter Notebook 열기:
03_01_ros_topic_publisher.ipynb
노트북 내에서 셀을 실행하려면 Ctrl + Enter 를 사용하세요.
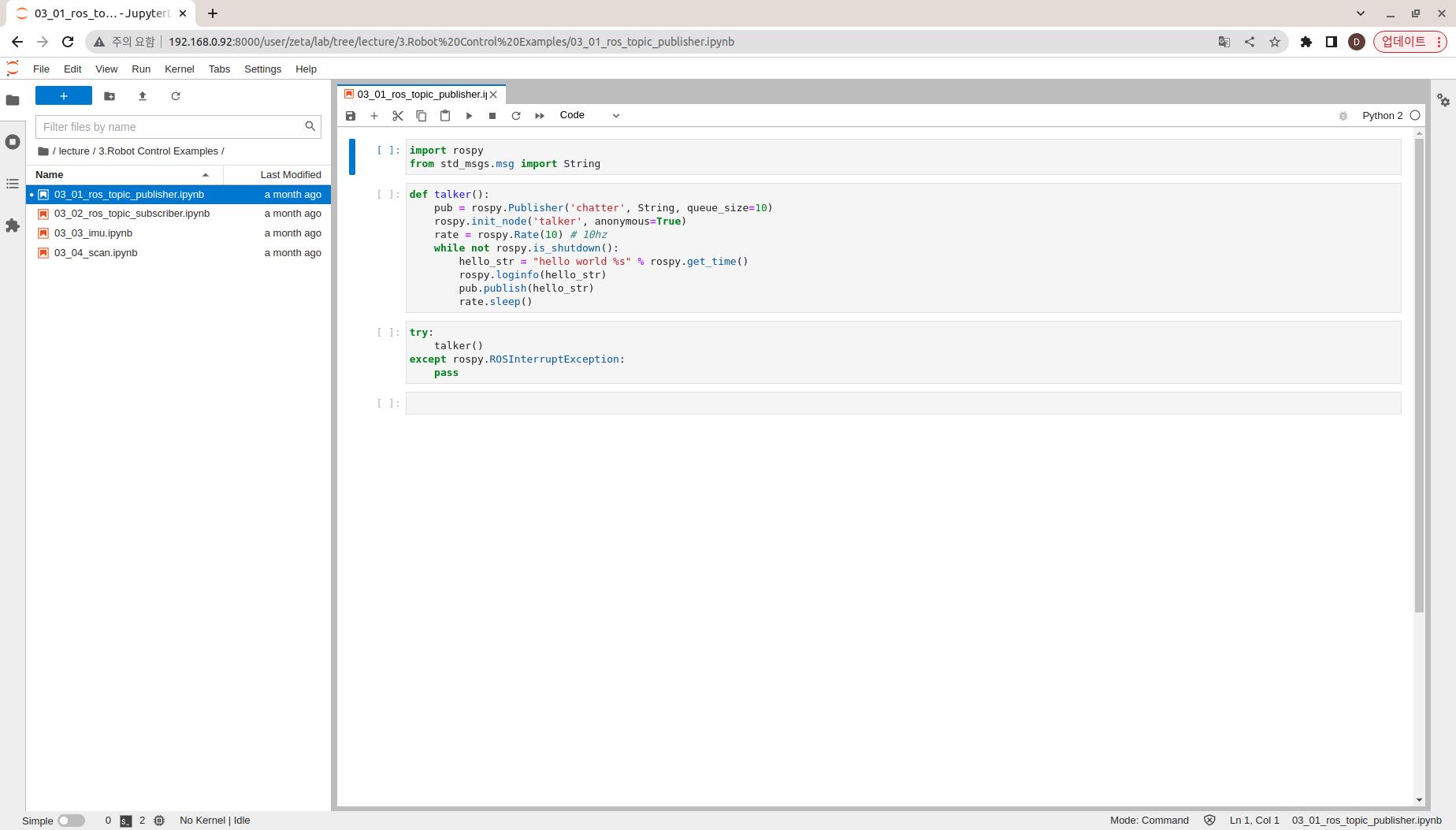
필요한 Python 라이브러리 및 모듈 가져오기
import rospy
from std_msgs.msg import String
talker() 함수 생성
talker() 기능 내에서:
Talker 노드 및 Chatter topic 만들기
“hello world” + ROS 타임스탬프 메시지 반복 게시 (per 10hz)
def talker():
pub = rospy.Publisher('chatter', String, queue_size=10)
rospy.init_node('talker', anonymous=True)
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
rospy.loginfo(hello_str)
pub.publish(hello_str)
rate.sleep()
핸들러 함수와 함께 talker() 함수를 실행합니다.
try:
talker()
except rospy.ROSInterruptException:
pass