AI 로봇 미래 동향과 교육
DAY 1
DAY 2
DAY 3
DAY 4
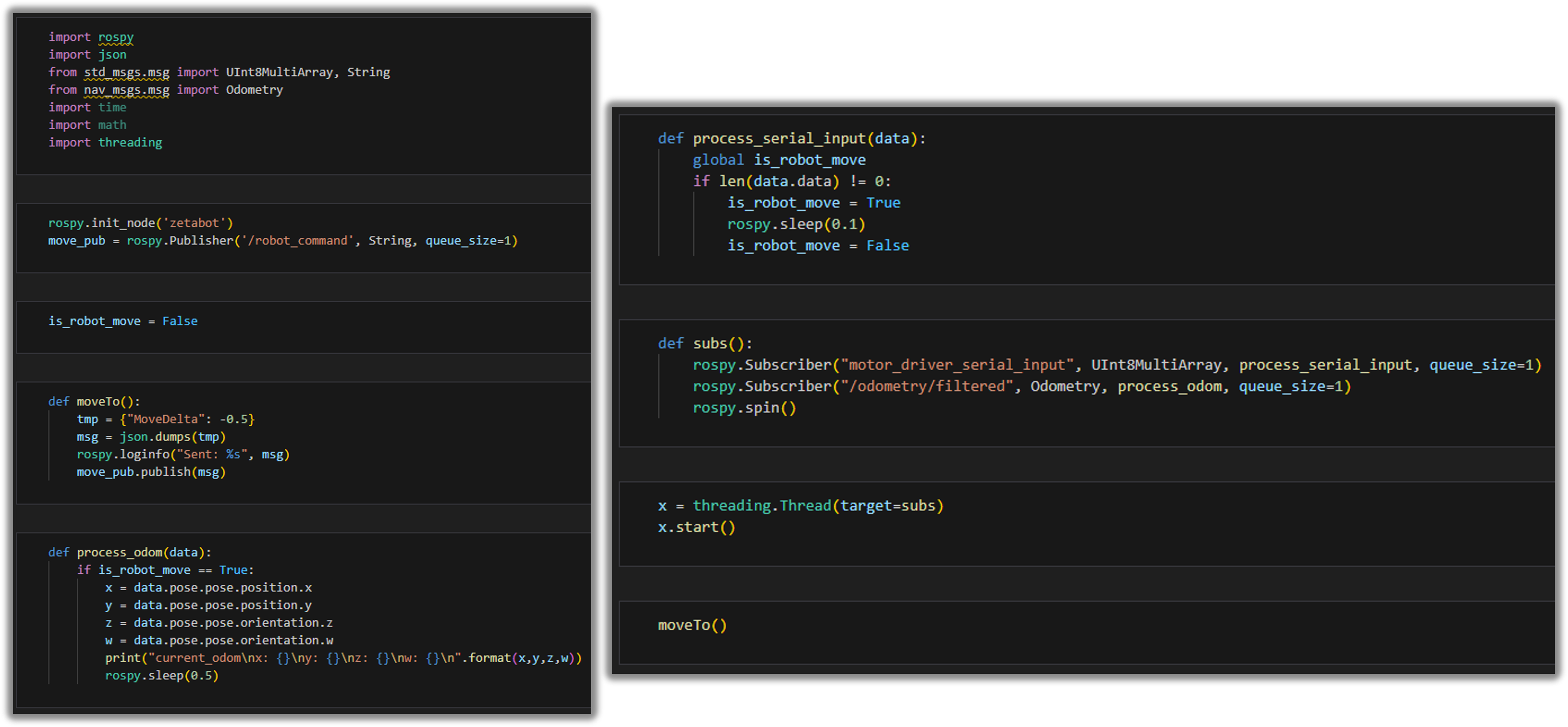
로봇이 이동함에 따라 로봇의 변화하는 좌표를 받아와 사용자에게 알려주는 예제입니다.
로봇의 x, y, z, w 좌표값을 받아와 출력
로봇의 주행 상태 알림 함수
모터 드라이버의 시리얼과 필터링 된 odometry 정보를 구독하는 함수