IMU
따라하기: IMU 센서 작동 예제
매개변수 설정과 함께 프로그램 시작 프로세스가 모두 단순화되었으며 Jupyter Notebook 환경에서 설정됩니다.
- 03_03_imu.ipynb Jupyter Notebook을 엽니다.
- 필요한 Python 라이브러리 및 모듈을 가져옵니다.
- 예제 코드를 따라 실행해보세요.
(이 예시에 사용된 Jetson 보드는 'Jetson Nano' 입니다.)
Jupyter Notebook 열기:
03_03_imu.ipynb
노트북 내에서 셀을 실행하려면 Ctrl + Enter 를 사용하세요.
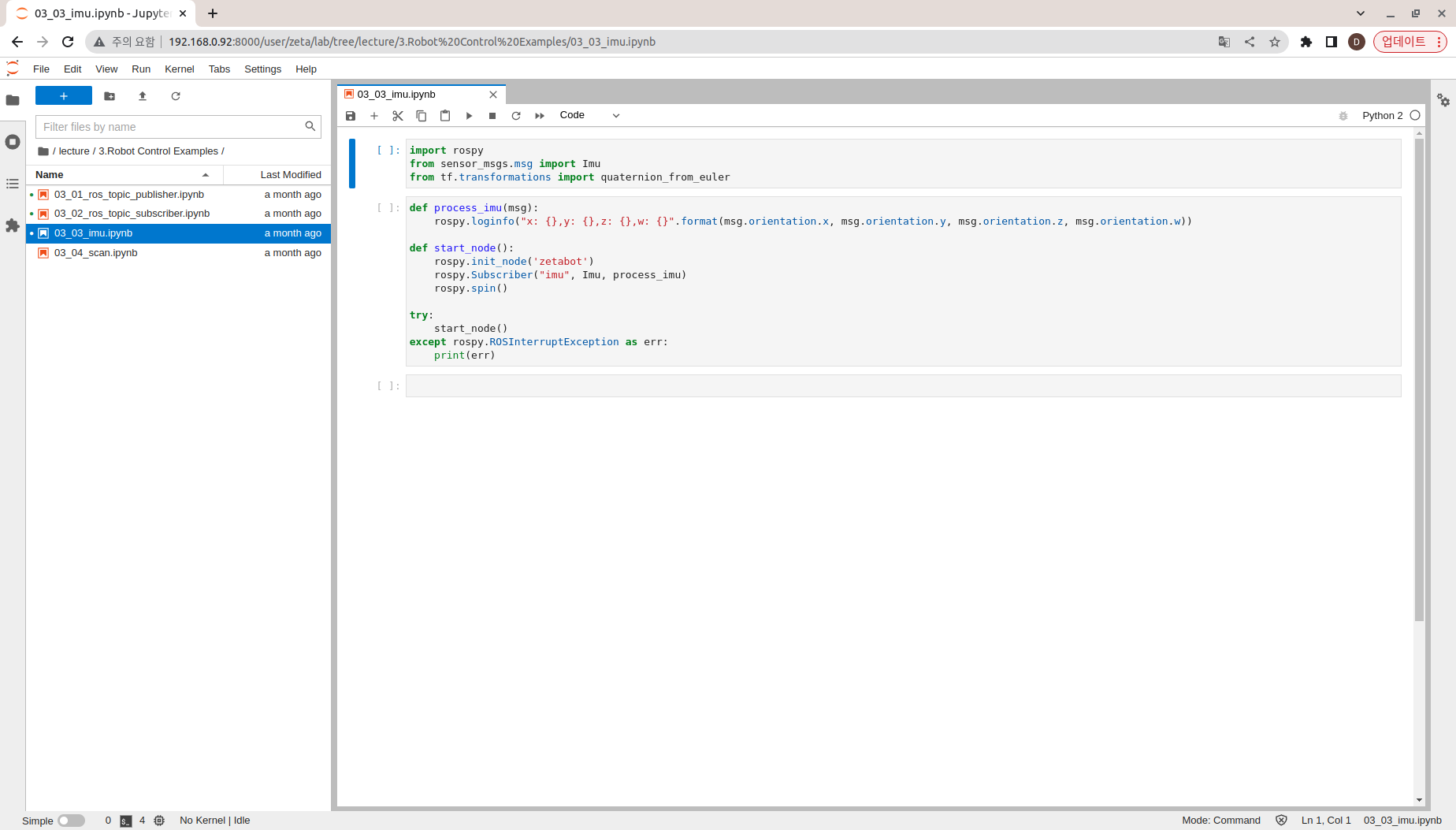
필요한 Python 라이브러리 및 모듈 가져오기
import rospy
from sensor_msgs.msg import Imu
from tf.transformations import quaternion_from_euler
Zetabot Node 생성
“imu” Topic 구독하기
x, y, z, w 값으로 나누어 메시지 확인
def process_imu(msg):
rospy.loginfo("x: {},y: {},z: {},w: {}".format(msg.orientation.x, msg.orientation.y, msg.orientation.z, msg.orientation.w))
def start_node():
rospy.init_node('zetabot')
rospy.Subscriber("imu", Imu, process_imu)
rospy.spin()
try:
start_node()
except rospy.ROSInterruptException as err:
print(err)