ROS Command Example
예제 따라하기:
ROS Command Example <- 현재 설명 파트
따라하기: ROS Command Example
매개변수 설정과 함께 프로그램 시작 프로세스가 모두 단순화되었으며 Jupyter Notebook 환경에서 설정됩니다.
- 01_ros.ipynb Jupyter Notebook을 엽니다.
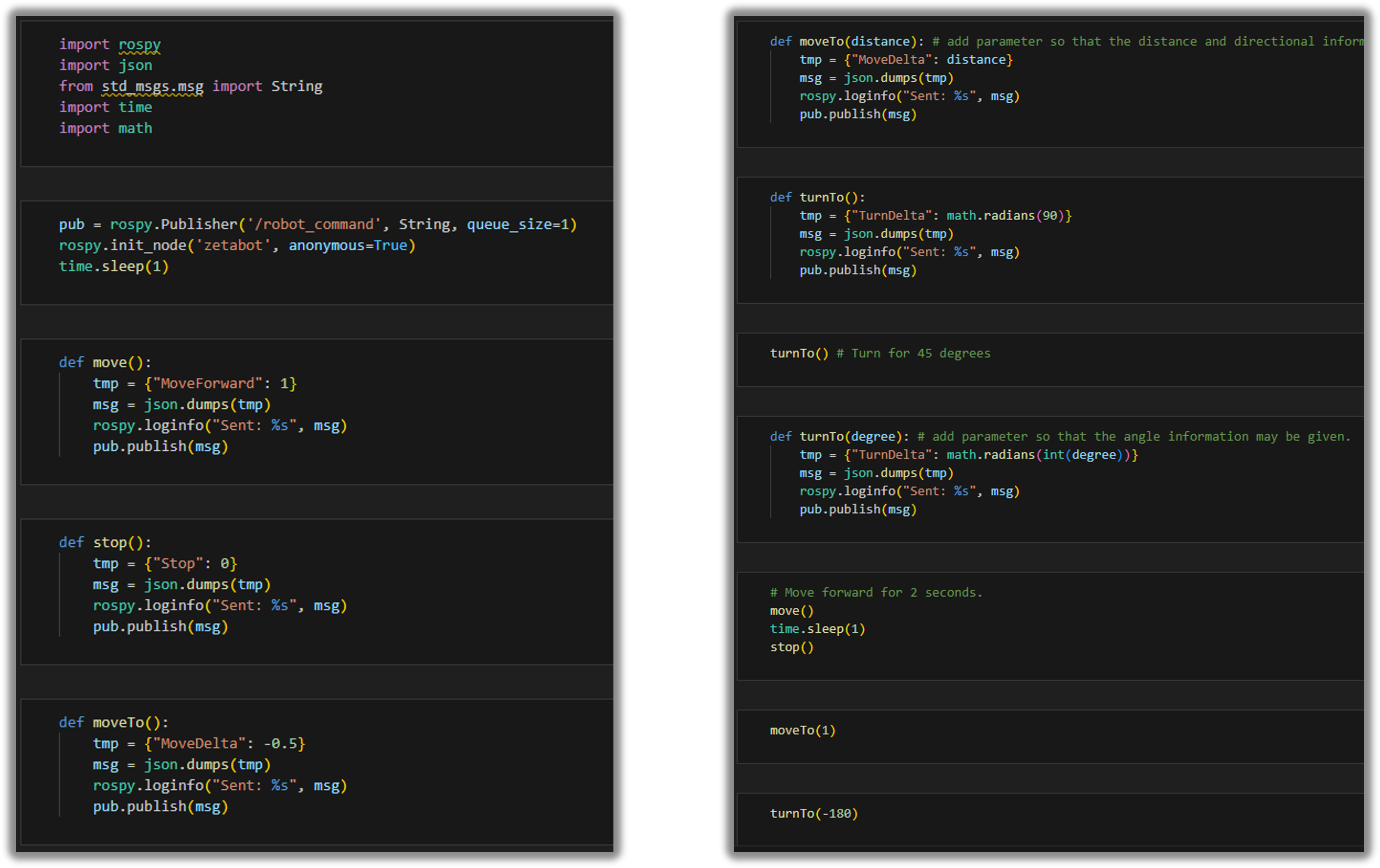
- 필요한 Python 라이브러리 및 모듈을 가져옵니다.
- 예제 코드를 따라 실행해보세요.
(이 예시에 사용된 Jetson 보드는 'Jetson Nano' 입니다.)
Jupyter Notebook 열기:
01_ros.ipynb
노트북 내에서 셀을 실행하려면 Ctrl + Enter 를 사용하세요.
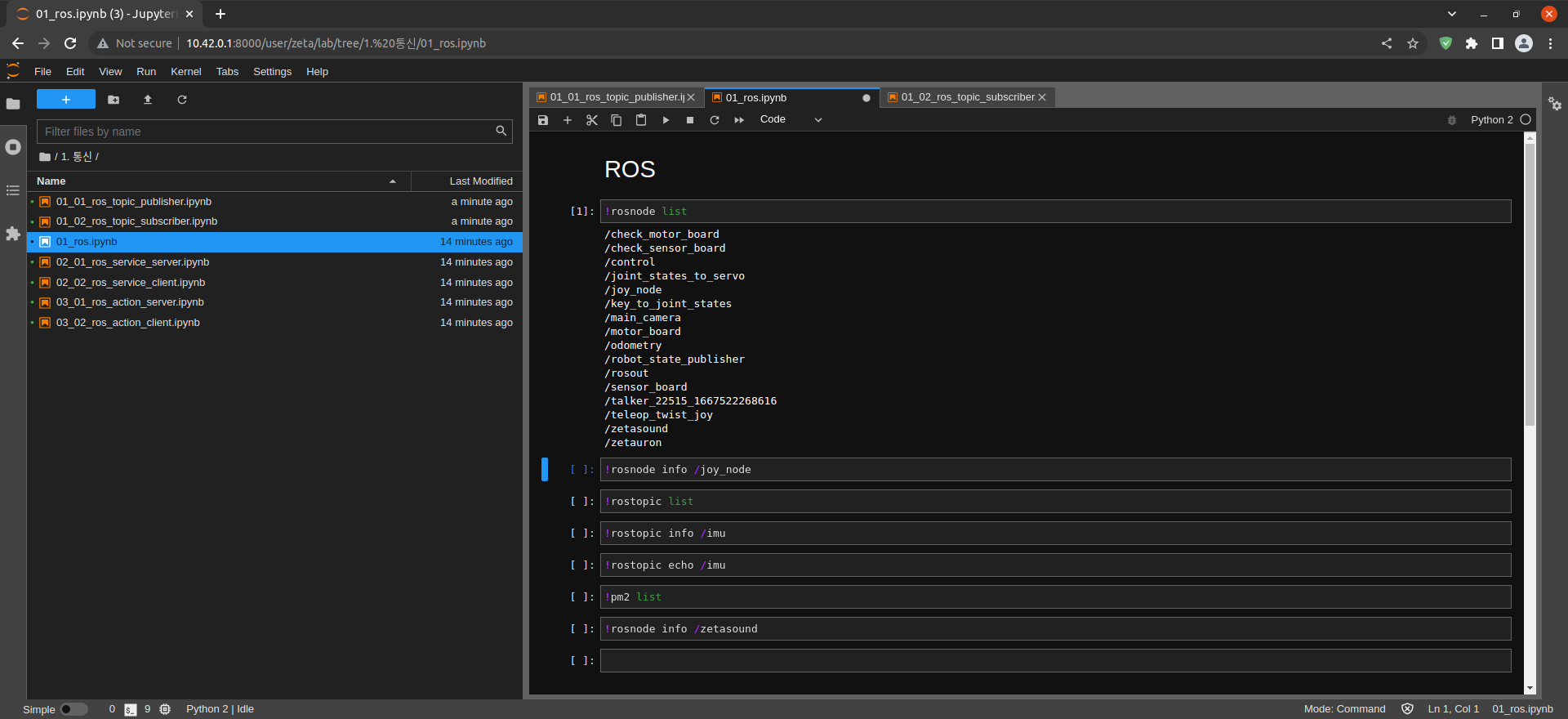
첫 번째 셀을 실행하여 현재 실행 중인 ROS 노드 목록을 출력합니다.
$ !rosnode list
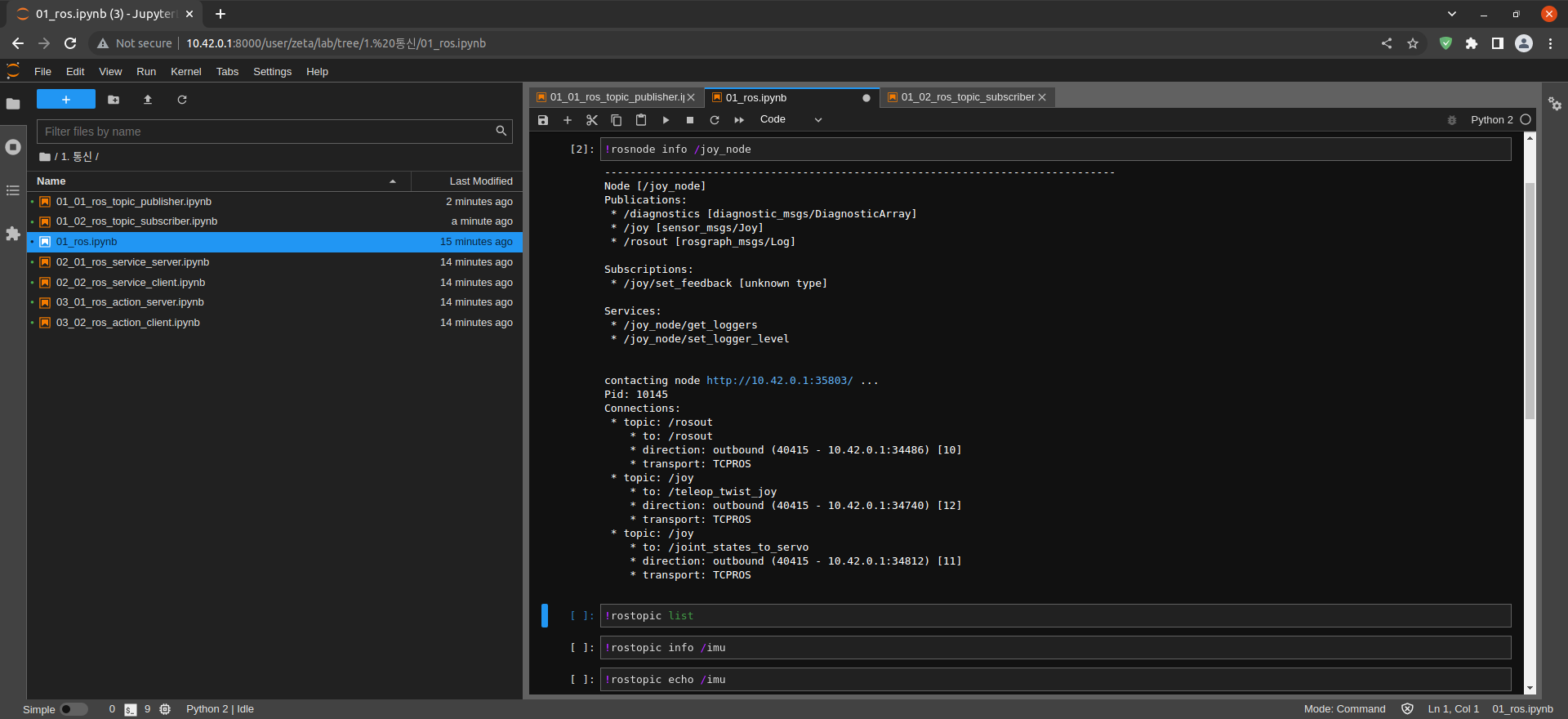
joy_node 정보를 출력합니다.
$ !rosnode info /joy_node
현재 실행 중인 ROS Topic 목록을 출력합니다.
$ !rostopic list
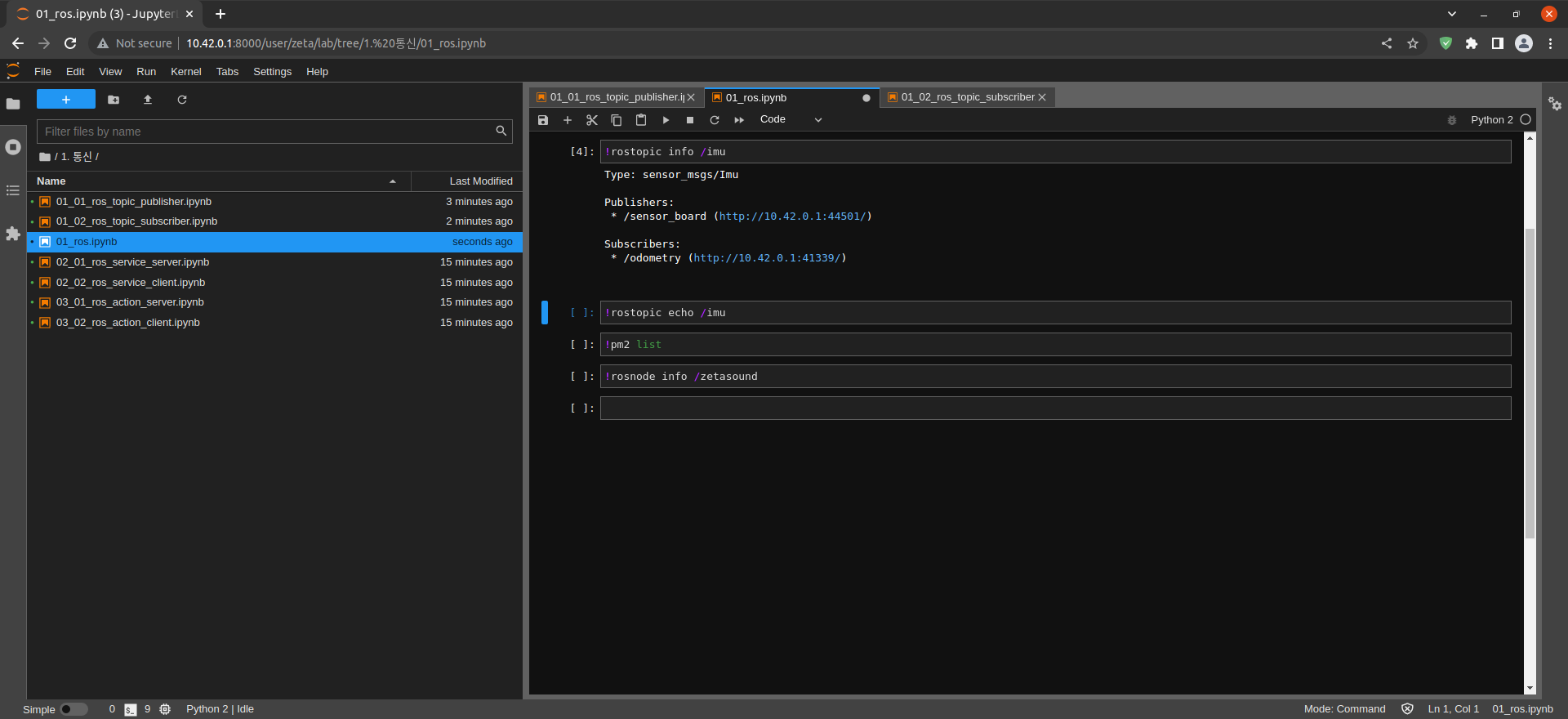
IMU Topic 정보 출력
$ !rostopic info /imu
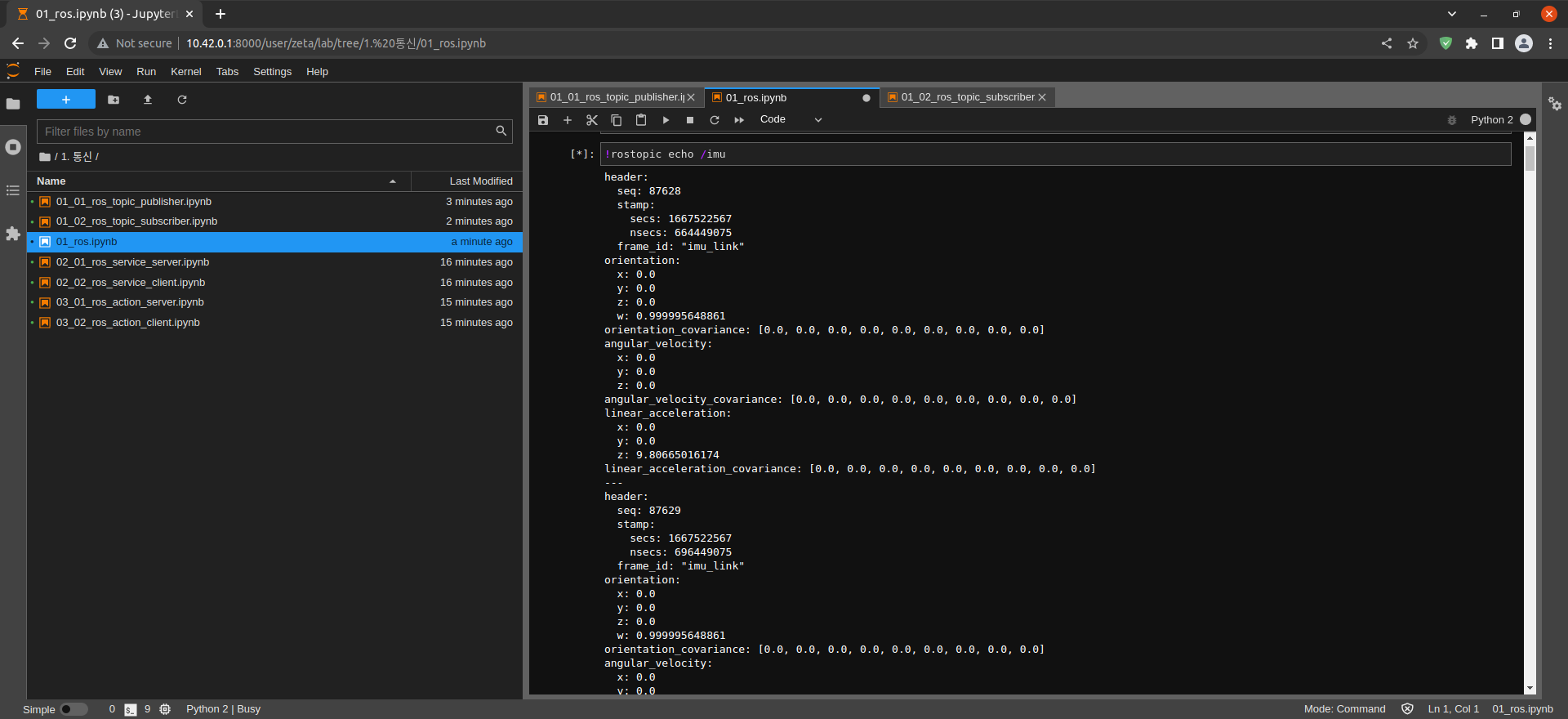
IMU Topic 메시지 출력
$ !rostopic echo /imu
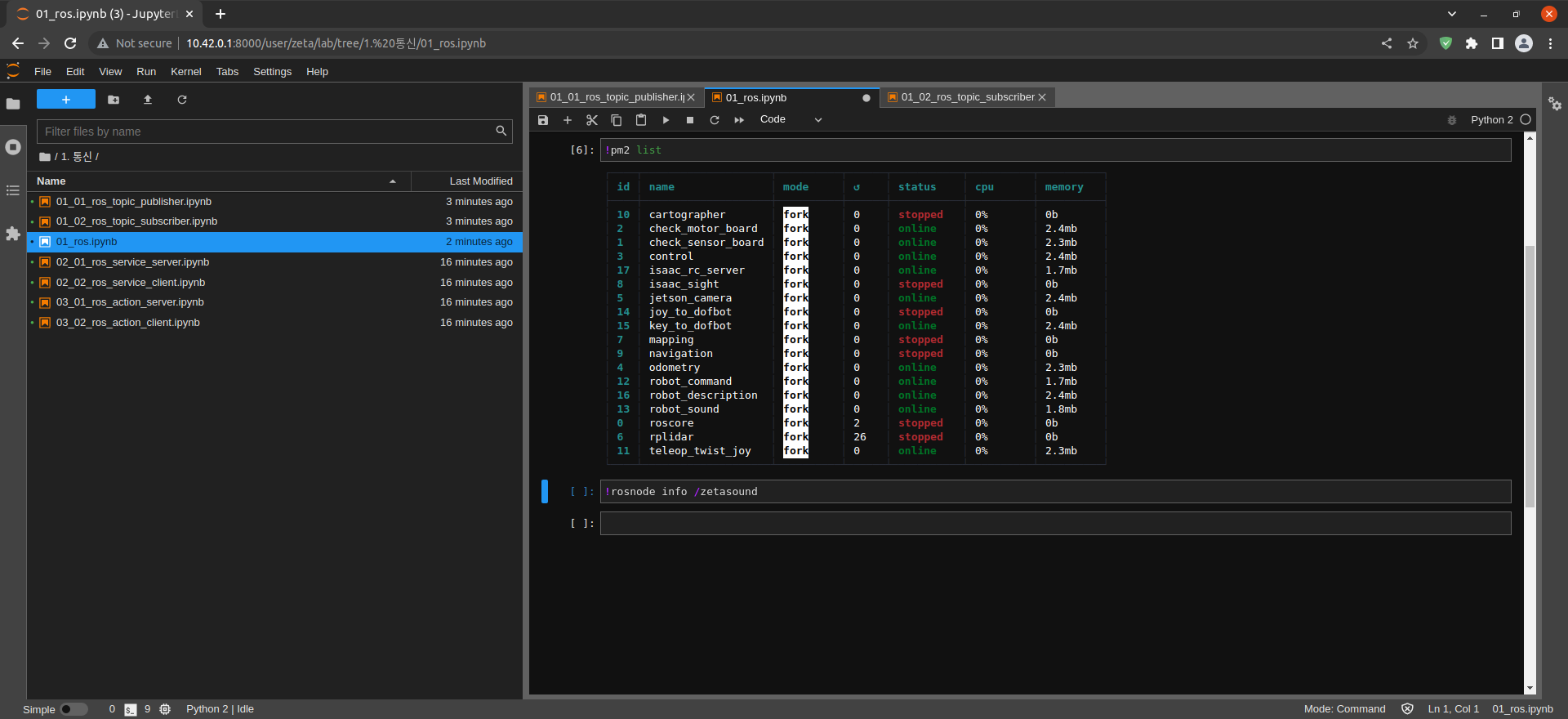
pm2를 사용하여 프로세스 목록 확인
$ pm2 list
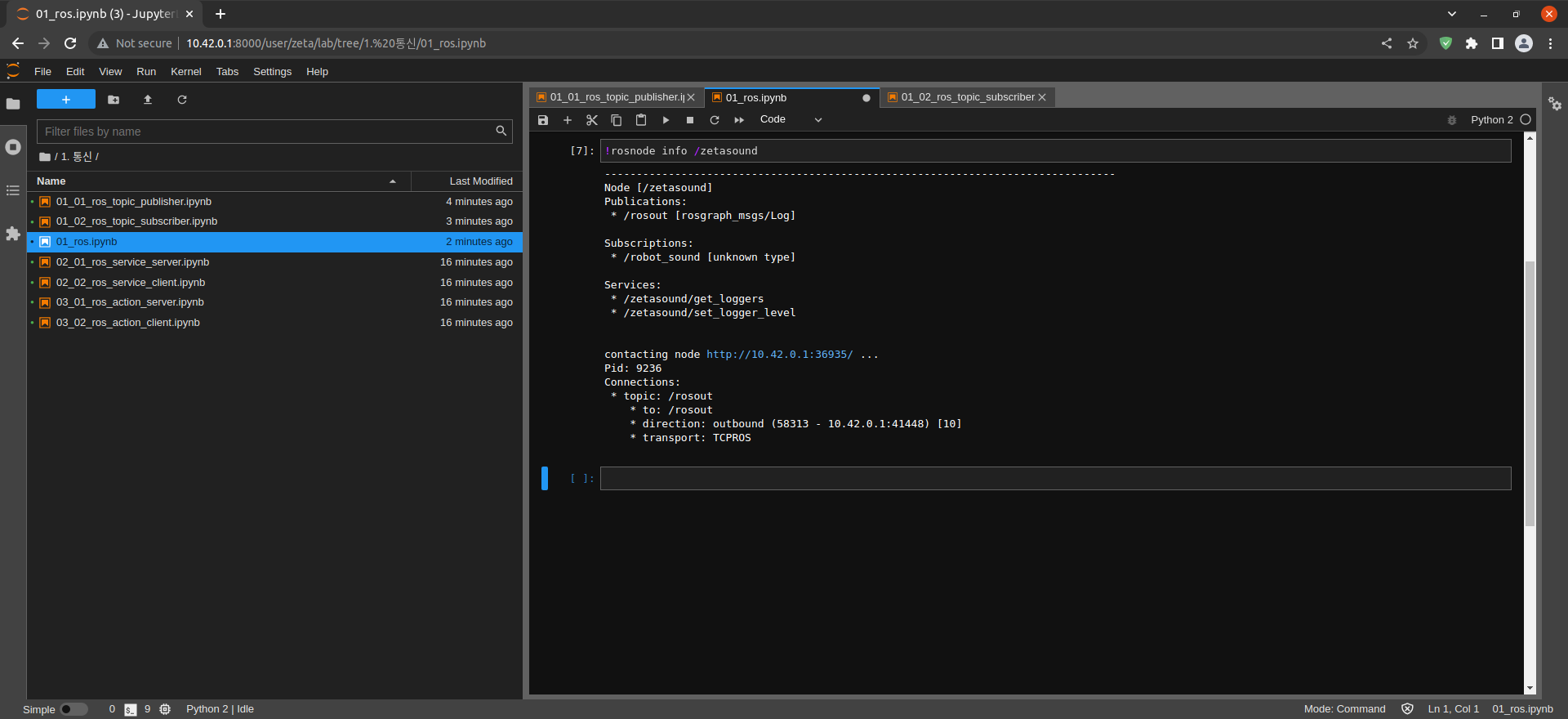
zetasound 노드 정보 출력
$ !rosnode info /zetasound