AI 로봇 미래 동향과 교육
DAY 1
DAY 2
DAY 3
DAY 4
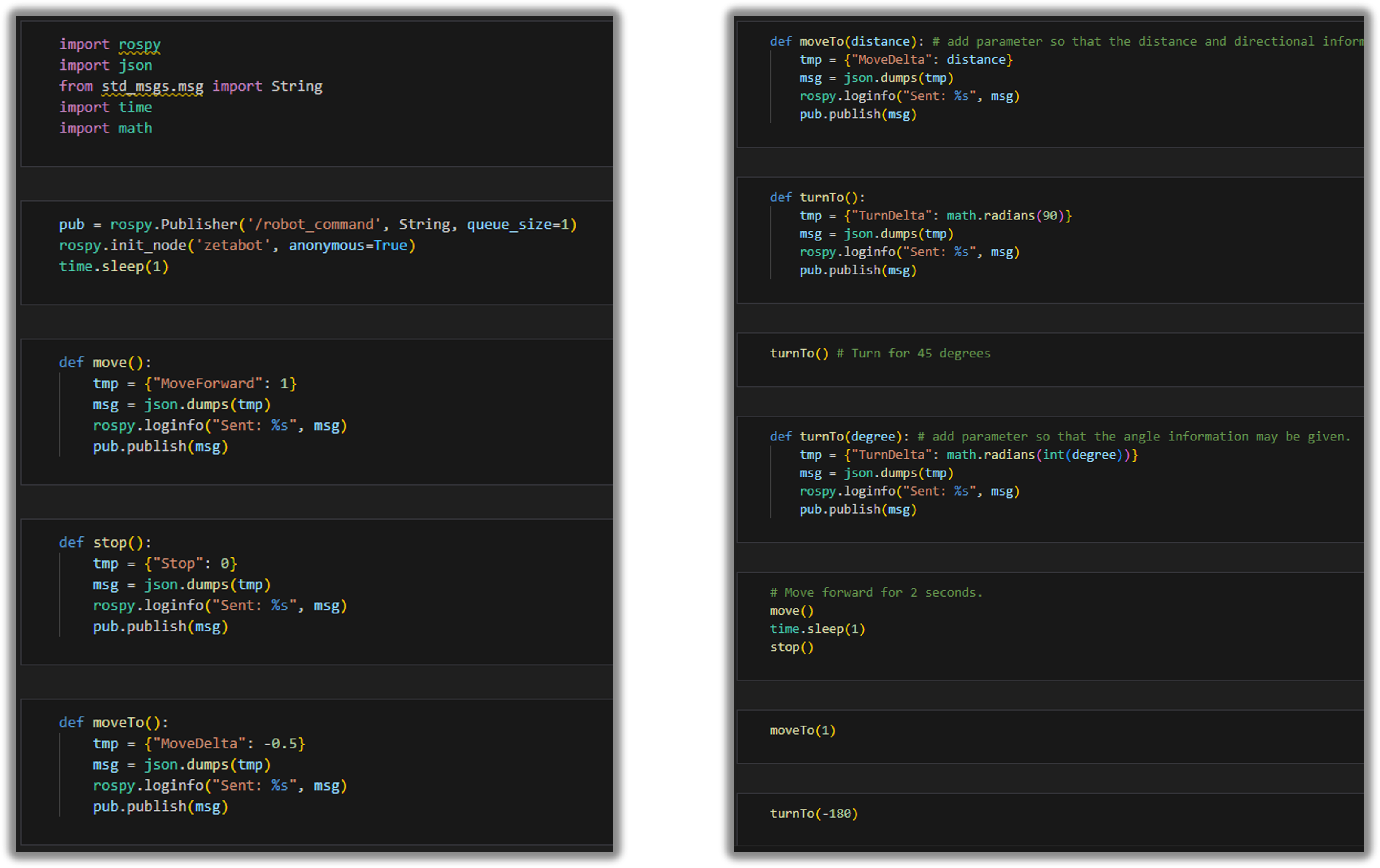
정면으로 1만큼 이동하는 함수
정지 함수
0.5 만큼 후진하는 함수
90 radian 만큼 회전하는 함수
입력한 거리만큼 이동하는 함수
입력한 radian 만큼 회전하는 함수